Technical Features
GoAhead 技术特性
GoAhead 采用四层架构设计,底层行人动力学负责碰撞避让与运动更新,寻路层实现智能路径规划,行为层驱动复杂人员行为逻辑,可视化层提供实时渲染与数据分析。四层各司其职、松散耦合,构成完整的仿真技术栈。
Architecture
架构
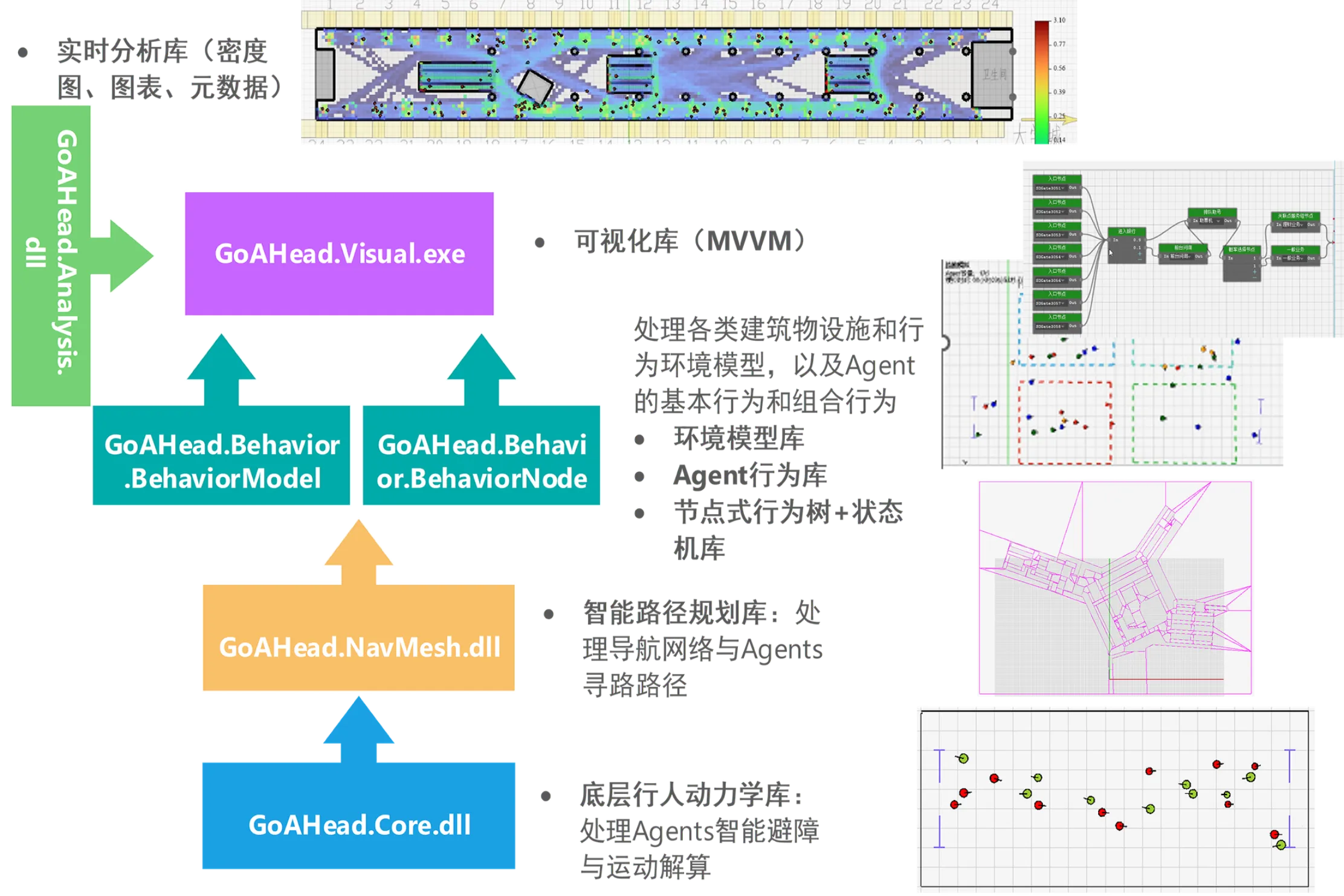
动力学层
ORCA 避障 + SteeringBehavior 转向力联合驱动,实现连续空间中的碰撞规避与自然运动
寻路层
基于导航网格(NavMesh)的路径规划,支持异步寻路与智能路径修正
行为层
行为树与有限状态机混合驱动,节点式编辑器实现可视化行为建模
可视化层
实时二维渲染、密度图分析、30+ 种统计图表与数据导出
Dynamics
行人动力学
GoAhead 动力学层由 ORCA 避障模型和 SteeringBehavior 转向力模型共同组成。ORCA 负责碰撞规避,SteeringBehavior 赋予行人自然的转向、跟随与排队能力。
ORCA 避障模型
ORCA(Optimal Reciprocal Collision Avoidance)是一种基于速度障碍的连续避障算法。每个 Agent 在速度空间中计算与周围 Agent 的半平面约束,通过线性规划求解最优速度,时间复杂度 O(n)。该方法天然解耦路径规划与碰撞规避,避免了社会力模型在高密度场景下的行人重叠和运动抖动等问题。
Social Force vs ORCA 对比演示
每组对比中,左侧为 GoAhead ORCA 模型,右侧为 Social Force 模型
对比一:避障能力、高密度表现
对比二:成拱流速与抖动表现
SteeringBehavior 转向力模型
转向力模块为 Agent 提供多种转向行为:Seek/Arrival(目标趋近与减速到达)、Wandering(随机漫游)、Path Following(路径跟随)、Make Way(主动让路)、Queue(自适应排队)。转向力与 ORCA 协同工作,使行人在避障的同时展现更自然的运动。
转向力行为演示
有转向力(左,GoAhead)vs 无转向力(右)对比
Pathfinding
智能寻路
GoAhead 采用导航网格(NavMesh)作为寻路基础,使用改进的 Simple Stupid Funnel 算法生成路径。路径具有"宽度"属性,拐角偏离值由概率分布决定,使行人路径更加自然多样。支持异步寻路(不阻塞主线程)和智能路径修正。
寻路演示
GoAhead Agent 寻路(左)与某商业软件对比
Behavior
行为规划
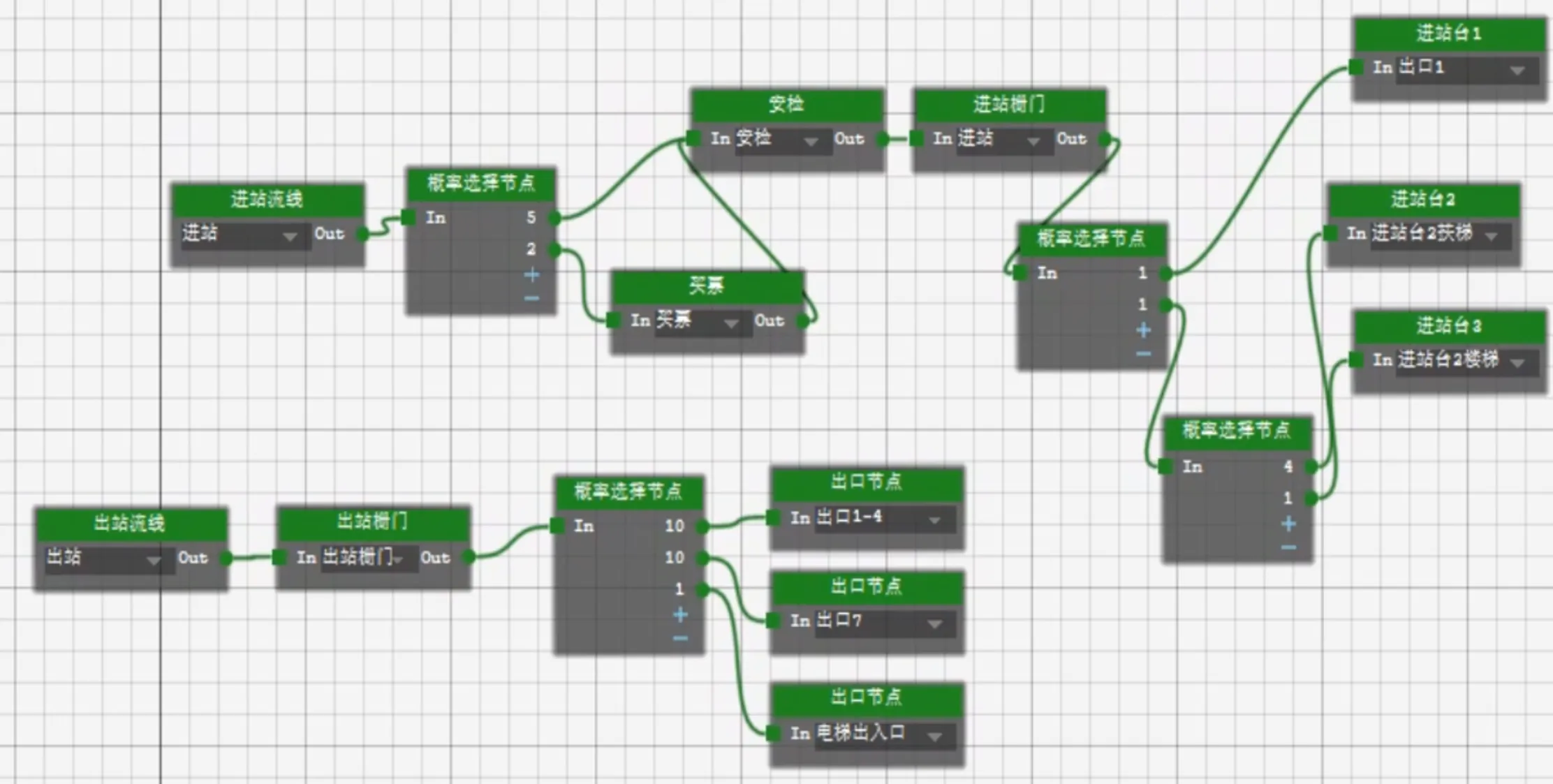
GoAhead 将行为树(Behavior Tree)与有限状态机(FSM)融合为统一的行为规划框架。用户通过节点式编辑器以流程图方式定义人员行为,无需编写代码。
节点式行为编辑器
行为树提供层次化决策结构,有限状态机管理具体状态流转。编辑器支持拖拽连线定义行为流程,实时预览调试。相较传统行为模板或行为表方式,大幅降低建模门槛。
行为模型演示
Building Facilities
建筑设施与多层仿真
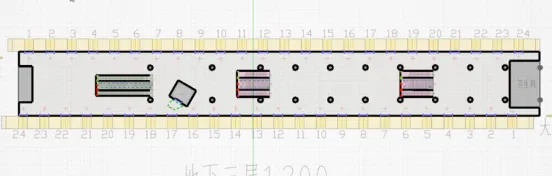
GoAhead 支持多楼层建模与多种建筑设施仿真,包括楼梯、扶梯、自动步道、闸机、单向门等。Agent 可根据目的地和设施状态自动选择交通方式。
Scene Modeling
场景导入与建模
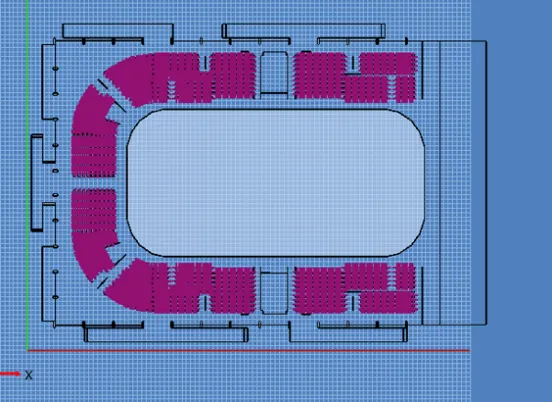
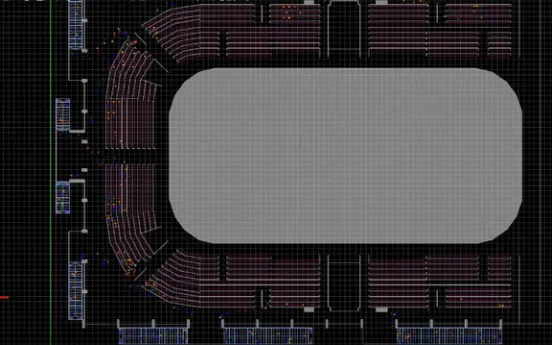
支持导入 DXF(CAD)文件生成障碍物与环境对象,也可使用自带二维绘图工具直接绘制场景。支持自定义 Agent 模板,可设置速度、尺寸、分布特征和可视化样式。
CAD 导入建模
导入 DXF 文件自动生成场景障碍物与环境对象
Performance
高性能实时仿真
完全并行设计,在上万 Agent 条件下达到流畅实时仿真(20,000 Agent @ 60fps,AMD 5800X),高性能计算设备上最高支持 10 万人场景。仿真过程中支持"可见即可得"——添加/删除障碍物、修改参数无需停止仿真即时生效。
Visualization
丰富的可视化
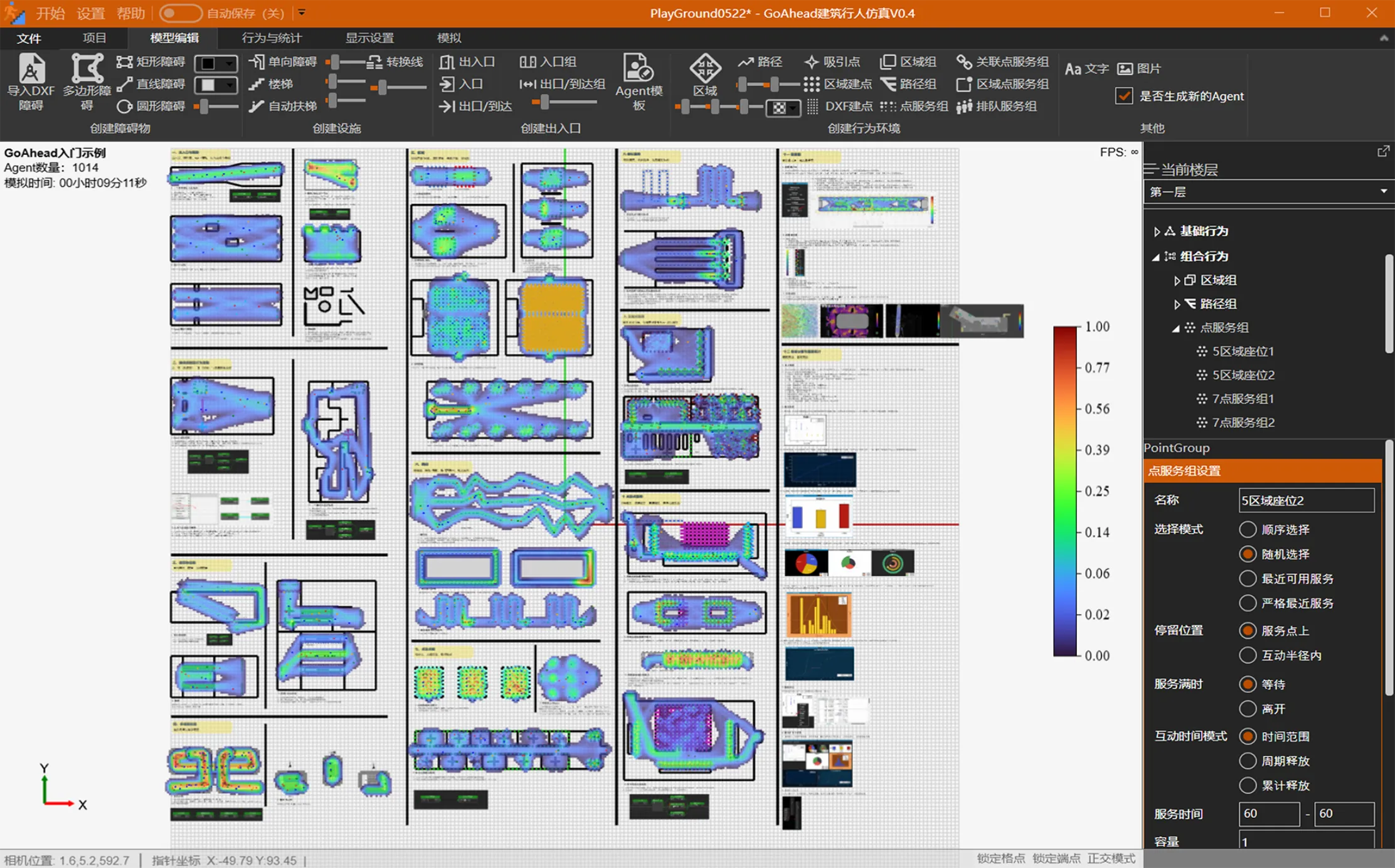
从界面到仿真,完全自定义颜色、图片/文字样式、透明度、Agent 样式。密度图和图表具备多种预置风格,支持实时切换预览。
Statistics
统计分析
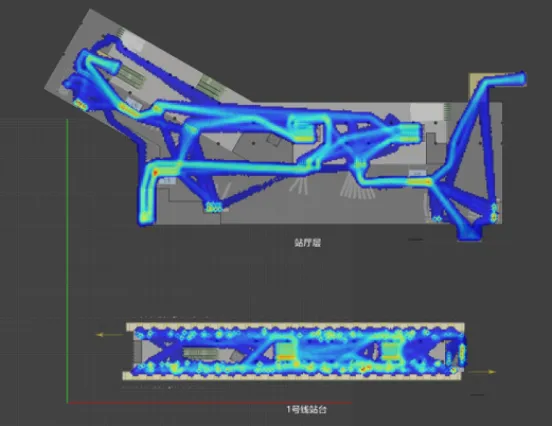
GoAhead 提供实时密度图、30+ 种统计图表和数据导出功能,覆盖流量、速度、密度、疏散时间等关键指标。
密度图分析
支持实时密度、最大密度和时空频率三种密度图模式
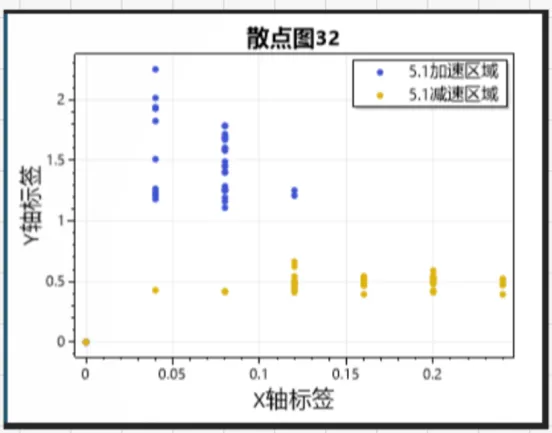
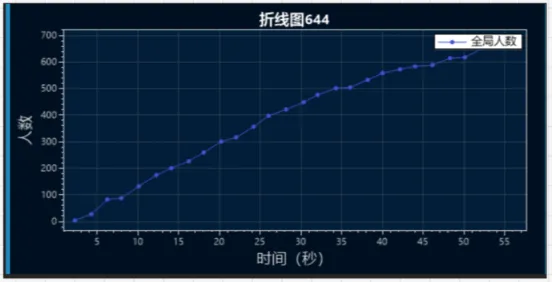
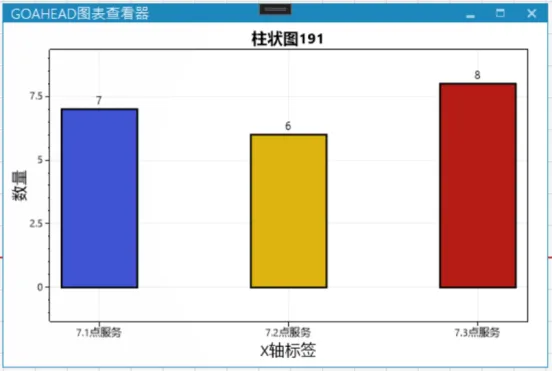
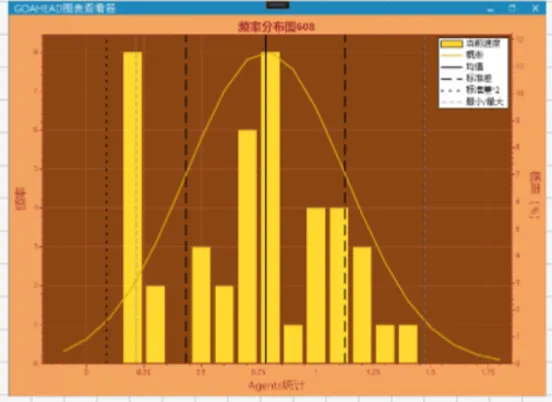
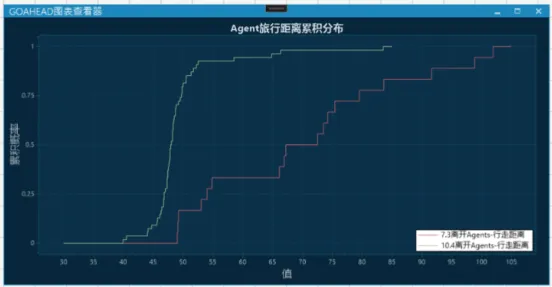
指标图表分析
内置 30+ 种实时数据图表,覆盖人员流量、行走速度、区域密度、疏散时间、排队长度等关键仿真指标,支持实时切换和预览。

数据导出
支持将仿真数据导出为 CSV / Excel 格式,便于在外部工具中进行深度统计分析和报告撰写。